Mobility / Grashof's Condition and Barker's Classification

I'm a Multan, Pakistan based Mechanical Engineer. I push pixels, shuffle data, and slap my keyboard until everything works.
Mobility of Mechanism
Degrees of freedom for planar linkages joined with common joints can be calculated through Gruebler’s equation.
Gruebler’s equation is given by the formula:
M = 3(L-1) - 2J1 - J2
where:
- M is degree of freedom or Mobility
- L is number of links
- J1 is number of full joints
- J2 is number of half joints

Grashof Condition
Grashof’s Law states that for a four-bar linkage system, if the sum of length of shortest and longest of a planar quadrilateral linkage is less than or equal to the sum of the remaining two links , then the shortest link can rotate freely with respect to neighbouring link.
Let denote the smallest link of four bar linkage with S and the longest link by L and the other two links by P and Q.

The necessary condition to satisfy Grashof’s Law is :
S + L ≤ P + Q
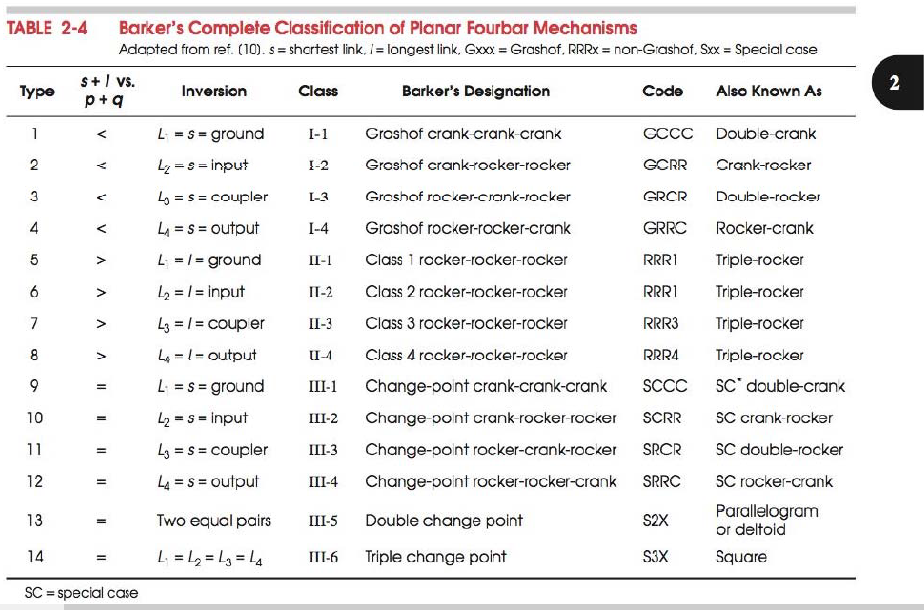
Barker's Classification